ros2 dynamixel
고정 거치대의 관절을 움직이기 위해서 dynamixel 모터를 사용하여 제어를 합니다. ros2를 통해 다이나믹셀을 제어하는 것을 정리해놓은 페이지입니다. 로보틱스e-maual을 참고하였습니다. 또한 ros2버전은 ros-dashing버전을 기준으로 하였습니다.
dynamixel test
리눅스에서 다이나믹셀이 제대로 작동하는지 테스트를 해보기 위해 먼저 DynamixelSDK를 설치하도록 하겠습니다.
설치를 위해서 먼저 컴파일러를 확인합니다. gcc 버전이 5.4.0 이상인지 확인합니다.
gcc -v # 버전 확인
sudo apt-get install gcc-[버전] # gcc 설치
의존 패키지들을 설치합니다.
sudo apt-get install build-essential
sudo apt-get install gcc-multilib g++-multilib
DynamixelSDK를 다운로드 합니다.
git clone https://github.com/ROBOTIS-GIT/DynamixelSDK.git
ros에서 다이나믹셀을 구동시킬 것이기 때문에 DynamixelSDK에서는 구동 테스트만 하도록 하겠습니다. 예제파일을 컴파일하고 실행하도록 합니다. 현재 사용하는 모델이 XH430-w350-R이기 때문에 protocol2.0를 사용하도록 하겠습니다.
cd [DynamixelSDK 위치]/c++/example/protocol2.0/read_write/linux64
make
그럼 read_write라는 파일이 생긴것을 확인할 수 있습니다. 이제 다이나믹셀을 연결하도록 합니다. 다이나믹셀을 컴퓨터와 연결하기 위해선 u2d2장치가 필요합니다.
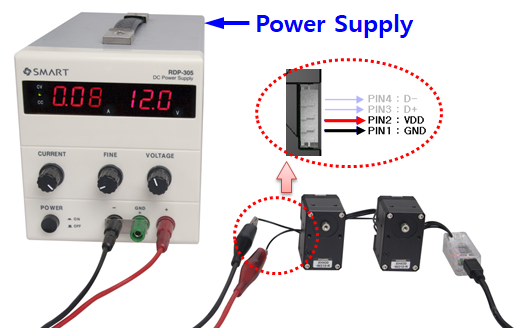
u2d2장치는 다이나믹셀에 전원을 넣어주진 못하므로 외부전원을 따로 넣어줘야 합니다. u2d2와 다이나믹셀 그리고 외부전원 12V를 다음 그림과 같이 연결합니다. 정상적으로 전원을 인가한 경우 다이나믹셀 뒷편의 LED에 불이 들어왔다 꺼지는 것을 확인할 수 있습니다.
이제 다이나믹셀을 구동해보도록 합니다.
sudo chmod a+rw /dev/ttyUSB0
./read_write
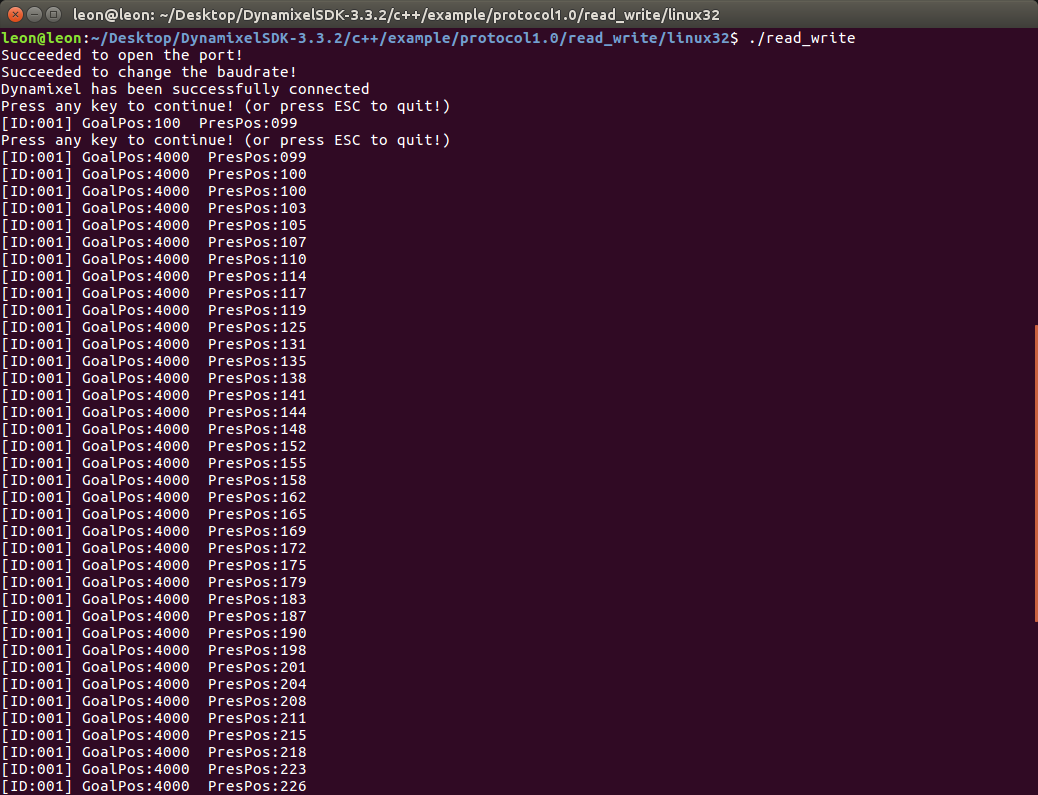
만약 그림과 같이 구동되지 않고 문제가 생긴다면 [DynamixelSDK 위치]/c++/example/protocol2.0/read_write 위치의 read_write.cpp파일을 확인합니다.
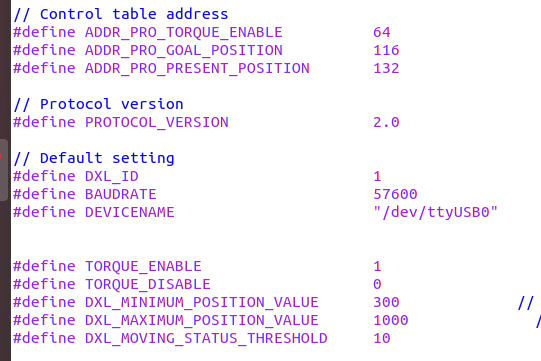
다음 그림과 같이 컨트롤 테이블 및 파라미터를 설정한 후 다시 다이나믹셀을 구동하도록 합니다.
다이나믹셀 모델마다 파라미터가 다를 수 있습니다. e-manual 을 통해 사용하는 모델의 컨트롤 테이블을 확인할 수 있습니다.
dynamixel ros2
다이나믹셀이 정상작동함을 확인하였으므로 다이나믹셀 ros2 패키지를 설치하도록 합니다.
mkdir dynamixel_ws && cd dynamixel_ws
mkdir src && cd src
git clone -b ros2 https://github.com/ROBOTIS-GIT/DynamixelSDK.git
git clone -b ros2 https://github.com/ROBOTIS-GIT/dynamixel-workbench.git
ros1의 Dynamixel Workbench은 예제파일이 있어 ros에서의 다이나믹셀 구동을 시험해볼 수 있으나 ros2 Dynamixel Workbench에는 없는것을 확인할 수 있습니다. 그러므로 간단한 구동 확인을 위한 실행 파일을 작성해보도록 합니다.
DynamixelSDK은 c/c++, python 등의 API를 지원하나 현재 ros2-dashing 환경에서는 c++만 지원합니다.
먼저 ros2 pkg를 만들도록 합니다
ros2 pkg create --build-type ament_cmake test_dynamixel
그후 test_dynamixel/src 경로에 test_move.cpp파일을 추가합니다. test_move.cpp의 내용은 다음과 같습니다.
#include <rclcpp/rclcpp.hpp>
#include "std_msgs/msg/int16.hpp"
#include "dynamixel_sdk/dynamixel_sdk.h"
rclcpp::Node::SharedPtr node = nullptr;
using namespace dynamixel;
// Control table address
#define ADDR_OPERTAING_MODE 11
#define ADDR_TORQUE_ENABLE 64 // Torque on/off 제어
#define ADDR_GOAL_VELOCITY 104 // 속도 제어
#define ADDR_GOAL_POSITION 116 // 위치 제어
#define ADDR_PRESENT_POSITION 132 // 현재 위치
// Protocol version
#define PROTOCOL_VERSION 2.0 // Default Protocol version of DYNAMIXEL X series.
// Default setting
#define DXL1_ID 1 // DXL1 ID
#define DXL2_ID 2 // DXL2 ID
#define BAUDRATE 57600 // Default Baudrate of DYNAMIXEL X series
#define DEVICE_NAME "/dev/ttyUSB0"
#define VALUE 100
#define OPERATING_VALUE 1 // 제어모드, 위치제어: 3, 속도제어: 1
PortHandler *portHandler;
PacketHandler *packetHandler;
void topic_callback(const std_msgs::msg::Int16::SharedPtr msg)
{
uint8_t dxl_error = 0;
packetHandler->write4ByteTxRx(portHandler, DXL1_ID, ADDR_GOAL_VELOCITY, msg->data,&dxl_error);
RCLCPP_INFO(node->get_logger(), "velocity: %d", msg->data);
}
int main(int argc, char **argv)
{
uint8_t dxl_error = 0;
rclcpp::init(argc, argv);
node = rclcpp::Node::make_shared("Dynamixel");
portHandler = dynamixel::PortHandler::getPortHandler(DEVICE_NAME);
packetHandler = dynamixel::PacketHandler::getPacketHandler(PROTOCOL_VERSION);
if(portHandler->openPort() == false)
{
RCLCPP_INFO(node->get_logger(),"Failed to open the port!");
}
if(portHandler->setBaudRate(BAUDRATE) == false)
{
RCLCPP_INFO(node->get_logger(),"Failed to set the baudrate!");
}
packetHandler->write1ByteTxRx(portHandler, DXL1_ID, ADDR_OPERTAING_MODE, OPERATING_VALUE, &dxl_error);
packetHandler->write1ByteTxRx(portHandler, DXL1_ID, ADDR_TORQUE_ENABLE, 1, &dxl_error);
RCLCPP_INFO(node->get_logger(),"start setting");
packetHandler->write4ByteTxRx(portHandler, DXL1_ID, ADDR_GOAL_VELOCITY, VALUE);
auto subscription =
node->create_subscription<std_msgs::msg::Int16>("/cmd_velocty", 10, topic_callback);
rclcpp::spin(node);
packetHandler->write1ByteTxRx(portHandler, DXL1_ID, ADDR_TORQUE_ENABLE, 0, &dxl_error);
rclcpp::shutdown();
return 0;
}
그후 package.xml를 수정하도록 합니다.
<depend>rclcpp</depend>
<depend>dynamixel_sdk</depend>
<depend>dynamixel_workbench_toolbox</depend>
<depend>std_msgs</depend>
위 네 항목을 추가합니다. 그다음은 Cmakelist.txt를 수정합니다.
find_package(std_msgs REQUIRED)
find_package(rclcpp REQUIRED)
find_package(dynamixel_sdk REQUIRED)
find_package(dynamixel_workbench_toolbox REQUIRED)
add_executable(test_move src/test_move.cpp)
ament_target_dependencies(test_move rclcpp dynamixel_sdk dynamixel_workbench_toolbox std_msgs)
install(TARGETS
test_move
DESTINATION lib/${PROJECT_NAME})
Cmakelist.txt의 최종 형태는 다음과 같습니다.
cmake_minimum_required(VERSION 3.5)
project(cpp_pubsub)
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
find_package(std_msgs REQUIRED)
find_package(rclcpp REQUIRED)
find_package(dynamixel_sdk REQUIRED)
find_package(dynamixel_workbench_toolbox REQUIRED)
add_executable(test_move src/test_move.cpp)
ament_target_dependencies(test_move rclcpp dynamixel_sdk dynamixel_workbench_toolbox std_msgs)
install(TARGETS
test_move
DESTINATION lib/${PROJECT_NAME})
ament_package()
이후 dynamixel_ws로 돌아가 colcon으로 빌드합니다.
cd ~/dynamixel_ws
colcon build
작성한 패키지를 실행시킵니다.
. ~/dynamixel_ws/install/setup.bash
ros2 run test_dynamixel test_move /dev/ttyUSB0
아무 이상이 없다면 모터가 작동하는 것을 확인할 수 있습니다.
이제 토픽을 발행하여 다이나믹셀의 속도를 제어해보도록 하겠습니다. 새 터미널 창을 열고 토픽을 발행합니다.
ros2 topic pub /topic std_msgs/msg/Int16 "{data: 50}"
모터의 속도가 줄어든 것을 확인할 수 있습니다.