ros2 node
ros2의 노드와 관련된 이론을 정리한 페이지 입니다. 토픽, 서비스 등과 같이 노드 사이의 통신 역시 정리하였습니다. 모든 내용은 https://index.ros.org/doc/ros2/Tutorials/Understanding-ROS2-Nodes/#ros2nodes을 참고하였습니다. 또한 그림의 경우ROS History을 참고하였습니다.
node
ros에서 노드는 단일 목적을 담당하여 수행하여야 합니다. 또한 데이터를 다른 노드로 주거나 받을 수 있습니다. 한 프로그램이 모든 작업을 담당하는것이 아닌, 노드들이 작업을 분할하여 담당한다고 이해하면 될듯 합니다.
예시
설치 후 확인 과정에서 사용하였던 구독자, 발행자 노드를 실행시켜 봅시다. 터미널 창을 열어 발행자를 실행합니다.
. ~/ros2_dashing/install/local_setup.bash
ros2 run demo_nodes_cpp talker
또다른 터미널 창을 열어 구독자를 실행합니다.
. ~/ros2_dashing/install/local_setup.bash
ros2 run demo_nodes_py listener
구독자와 발행자 둘다 각각의 노드로서 기능을 합니다. 만약 노드의 이름을 확인하기 위해선 node list를 확인합니다.
ros2 node list
그 후 터미널 창을 확인하면 현재 실행되는 노드를 확인할 수 있습니다.
/listener
/talker
현재 예시에선 실행가능한 이름이 talker, listener이고 노드이름 역시 같지만, 실행가능한 이름과 노드의 이름이 다른 경우도 있습니다.
remapping
remapping을 통해 노드, 토픽, 서비스의 이름을 재정의 할 수 있습니다. 이를 통해 실행파일을 수정하지 않고도 원하는 노드 혹은 토픽의 이름을 수정하여 다른 결과를 내보낼 수도 있습니다. 위의 예시부분을 실행 한 후 또다른 터미널창을 열어 또다른 구독자를 실행합니다.
ros2 run demo_nodes_cpp listener __node:=listener2
그 후 현재 실행되는 노드를 확인하면 /listener2가 추가된 것을 확인할 수 있습니다.
/listener2
/talker
/listener
노드 정보
노드의 이름을 알고있을 경우 해당 노드의 정보를 알 수 있습니다.
ros2 node info <node_name>
예를 들어 talker노드의 정보를 알아보고자 한다면 다음과 같은 명령어를 실행시킵니다.
ros2 node info /talker
그럼 다음과 같은 정보를 확인할 수 있습니다.
/talker
Subscribers:
/parameter_events: rcl_interfaces/msg/ParameterEvent
Publishers:
/chatter: std_msgs/msg/String
/parameter_events: rcl_interfaces/msg/ParameterEvent
/rosout: rcl_interfaces/msg/Log
Services:
/talker/describe_parameters: rcl_interfaces/srv/DescribeParameters
/talker/get_parameter_types: rcl_interfaces/srv/GetParameterTypes
/talker/get_parameters: rcl_interfaces/srv/GetParameters
/talker/list_parameters: rcl_interfaces/srv/ListParameters
/talker/set_parameters: rcl_interfaces/srv/SetParameters
/talker/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomically
ROS1과 다른 점?
ROS1과 다른 점중 하나로 마스터와 파라미터 서버가 다른 위치에 존재한다는 것입니다.
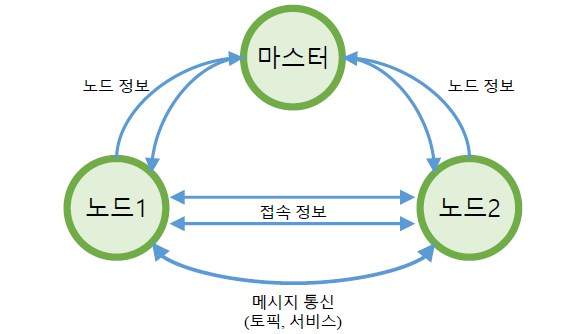
다음 그림과 같이 ROS1은 ROS Master가 노드간의 정보를 관리하고 통신을 관리하게 됩니다. 또한 ROS parameter server에서 노드들의 파라미터를 관리하도록 되어 있습니다. Master와 parameter server 노드는 roscore를 통해 실행되었습니다. 이 때문에 ROS Master에 문제가 생기는 경우 전체 시스템을 사용하지 못하는 문제점이 있었습니다.
이와 같은 문제점으로 인해 ROS2에서는 master가 사라지고 parameter server는 각 노드안에서 개별적으로 관리하게 되었습니다. 그 덕분에 parameter가 충돌하거나, 전체 시스템을 사용하지 못하는 문제점이 사라지게 되었습니다. 또한 통신방식 역시 기존의 TCP통신이 아닌 DDS방식으로 보안성을 높였다고는 하는데…. 통신에 대해선 이해가 좀 더 필요할 듯 합니다.
이 외에도 기존 ROS와 ROS2의 다른점은 많이 있습니다. Real-Time 지원, roslaunch의 파이썬 지원 등 여러 점이 추가되었고 각 내용들은 천천히 알아보도록 하겠습니다.